from IPython.display import display, Latex, Math
import phm
p = phm.phm()
bin(p.read_inputs())
def shutup():
p.set_frequency(0)
p.write_outputs(0b1000)
def shutup_handler(self, etype, value, tb, tb_offset=None):
shutup()
print 'KeyboardInterrupt'
get_ipython().set_custom_exc((KeyboardInterrupt,), shutup_handler)
def notify_speaker():
p.set_frequency(50)
def notify_led():
p.set_voltage(3000)
notify = notify_speaker
p.write_outputs(0b1000)
test the photo gate
f = 0
stepup = 20
stepdown = stepup * 3
dt = 0.1
fmax = 550
nmax = 15
nmin = 0
while True:
d = p.read_inputs()
if d is None:
continue
if d & 0b1000:
f += stepup
f = min(f, fmax)
else:
f -= stepdown
f = max(0,f)
p.set_frequency(f)
p.write_outputs(int(1.*f * nmax / fmax))
time.sleep(dt)
Activate the magnet
p.write_outputs(0b1110)
def magnetize():
p.write_outputs(0b1000)
def drop():
p.write_outputs(0b0010)
magnetize()
Now we measure time:
- drop the ball
- poll the light barrier for when the ball crosses its path
def wait(beats=3):
time.sleep(beats * 60. / tempo)
C4 = 130.81
def ready_beep(beats=1):
p.write_outputs(0b1100)
p.set_frequency(C4)
wait(beats)
p.write_outputs(0b1000)
p.set_frequency(0)
def go_beep(beats=1):
p.write_outputs(0b1010)
p.set_frequency(C4*2)
wait(beats)
p.set_frequency(0)
def catch_beep(beats=1):
p.write_outputs(0b1110)
p.set_frequency(C4*4)
wait(beats)
p.set_frequency(0)
p.write_outputs(0b000)
tempo = 600
def gate_blocked():
mask = None
while mask is None:
mask = p.read_inputs()
return (mask & 0b1000)
def time_drop():
print "waiting for signal ...",
sys.stdout.flush()
while not gate_blocked():
time.sleep(0.1)
print "ready ...",
sys.stdout.flush()
while gate_blocked():
ready_beep()
wait(4)
go_beep(3)
print "go!"
sys.stdout.flush()
start = time.time()
drop()
cycles = 0
while not gate_blocked():
cycles += 1
stop = time.time()
t = stop - start
err = 0.5 * t / cycles
t -= err
tms = 1e3*t
print u"%i ± %.1f ms" % (1e3 * t, 1e3 * err)
catch_beep()
magnetize()
return t, err
time_drop()
%pylab inline
ds = [0, 10, 15, 20, 25]
ts = [0]
errs = [0]
for d in ds[1:]:
print "move magnet to %i cm" % d
t, err = time_drop()
ts.append(t)
errs.append(err)
ds = np.array(ds)
ts = np.array(ts)
errs = np.array(errs)
plot(ds, ts, '-o')
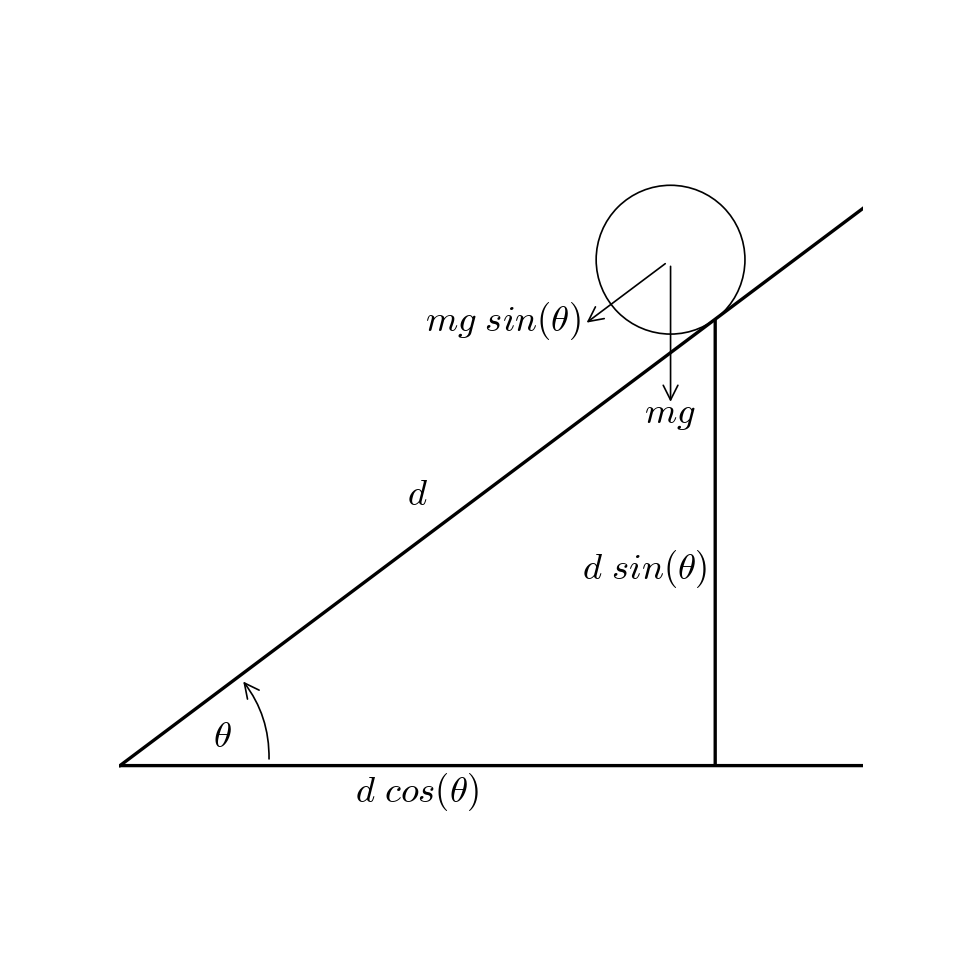
So we have the force pulling the ball down the incline:
F=mg sin(θ)
And the distance to the bottom d. The position of the ball along the plane is described by
¨x=g sin(θ)
Which we can integrate with the initial conditions
x(0)=˙x(0)=0
so we get
˙x=gt sin(θ)
x(t)=12gt2 sin(θ)
And we are measuring t where x(t)=d, so we have the equation
d=12gt2 sin(θ)
where d is known and t is measured, so we now have a relationship for g and θ:
sin(θ)=2dgt2
g=2dt2sin(θ)
From our measurements of t and d, we can get an expression for g sin(θ) by doing a least-squares fit for a second order polynomial, of the form:
d=at2
where
a=12g sin(θ)
plot(ts, ds, '-o')
xlabel("t")
ylabel("d")
Now do a least-squares fit for a in
d=at2
from scipy.optimize import leastsq
err_f = lambda a: a*ts*ts - ds
a = leastsq(err_f, 1)[0][0]
%config InlineBackend.figure_format = 'svg'
tt = np.linspace(0, ts[-1])
plot(tt, a * tt**2, '-', ts, ds, '-o');
and
g sin(θ)=2a
g_sin_theta = 2 * a
If we measure the elevation of the 30cm mark, we can get
sin(θ)=h30cm
sin_theta = 2.2 / 30
Which we can now plug into the above equation, solving for g
g=2asin(θ)
which will hopefully be close to the true value of gtrue=980.7
With our error Δg:
Δg=g−gtruegtrue
g = g_sin_theta / sin_theta
display(Latex("$g = %.1f$ cm/s" % g))
g_true = 980.7
dg = (g - g_true) / g_true
display(Latex("$g_{true} = %.1f$ cm/s" % g_true))
display(Latex(r"error $= %.1f$ %%" % (100*dg)))