Point cloud generation¶
In this article the algorithm to obtain a 3D point cloud in world coordinates system, from a vector of detected 2D points in the camera image is explained.
Acronyms¶
| Symbol | Description |
|---|---|
| $c$ | Camera coordinate system |
| $w$ | World coordinate system |
| $w_\theta$ | World coordinate system rotated $\theta$ in z coordinate |
| $(u, v)$ | Coordinates of the projection point (px) |
| $K$ | Camera matrix or matrix of intrinsics parameters (px) |
| $f_x, f_y$ | Vertical and horizontal focal lengths (px) |
| $c_x, c_y$ | Vertical and horizontal optical centers (px) |
| $\textbf{x}$ | Coordinates of the projection point normalized |
| $d$ | Laser plane minimum distance (mm) |
| $\textbf{n}$ | Laser plane normal vector normalized |
| $\textbf{X}_c$ | Coordinates of the projection point in $c$ (mm) |
| $R_c$ | World rotation matrix in $c$ |
| $\textbf{t}_c$ | World translation vector in $c$ (mm) |
| $\textbf{X}_{w_\theta}$ | Coordinates of the projection point in $w_\theta$(mm) |
| $R_z(\theta)$ | Rotation matrix in z of $\theta$ |
| $\textbf{X}_w$ | Coordinates of the projection point in $w$ (mm) |
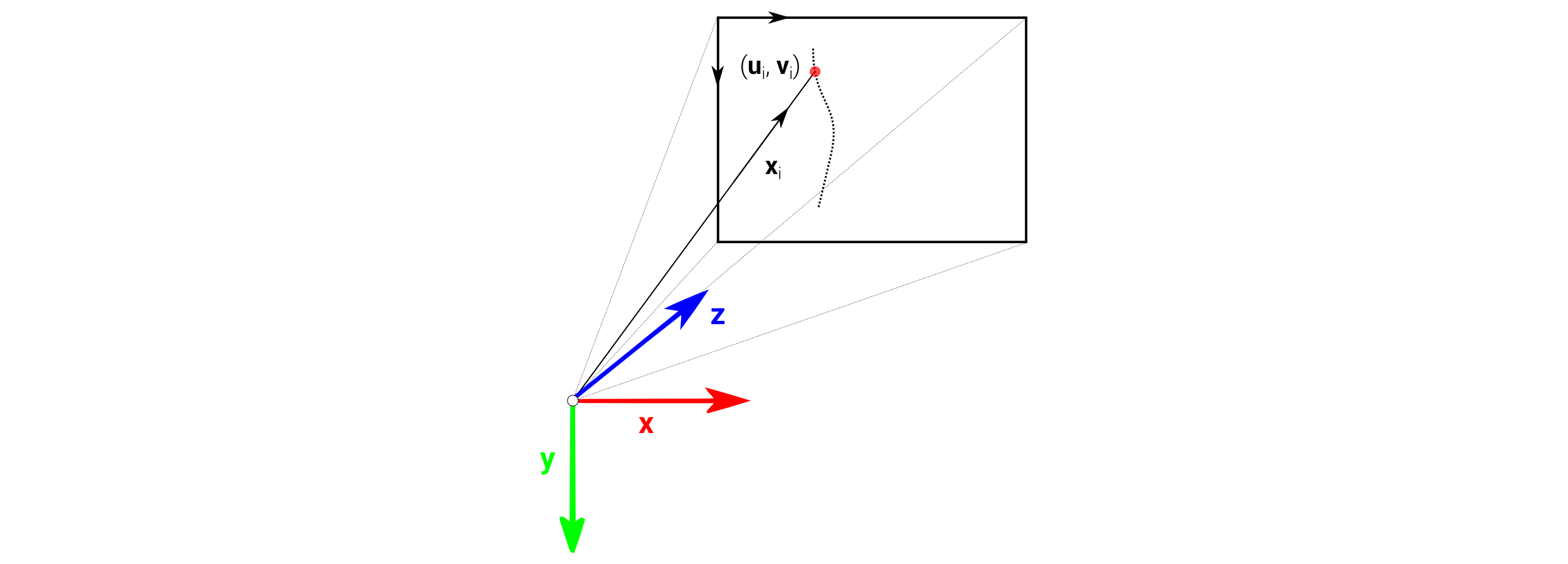
Image coordinates¶
A vector of $(u, v)$ values has been obtained from previous image processing of the laser impact into the object. To simplify it, only one point $(u, v)$ will be used instead of the whole vector. The coordinate $u$ corresponds to the horizontal coordinate and $v$ to the vertical coordinate of the image. The origin of coordinates is in the top-left corner of the image.

import numpy as np
u = 353.21
v = 231.96
Projection point¶
Camera matrix relates the image system with the normalized 3D coordinates. It contains vertical an horizontal focal lengths and optical centers in pixel units.
Using $u$ and $v$ coordinates from the video image where the point is captured, the projection point vector without units can be obtained.
fx = 1430; fy = 1430; cx = 480; cy = 640
x = np.matrix([[(u - cx) / fx], [(v - cy) / fy], [1]])
print(x)
[[-0.08866434] [-0.28534266] [ 1. ]]
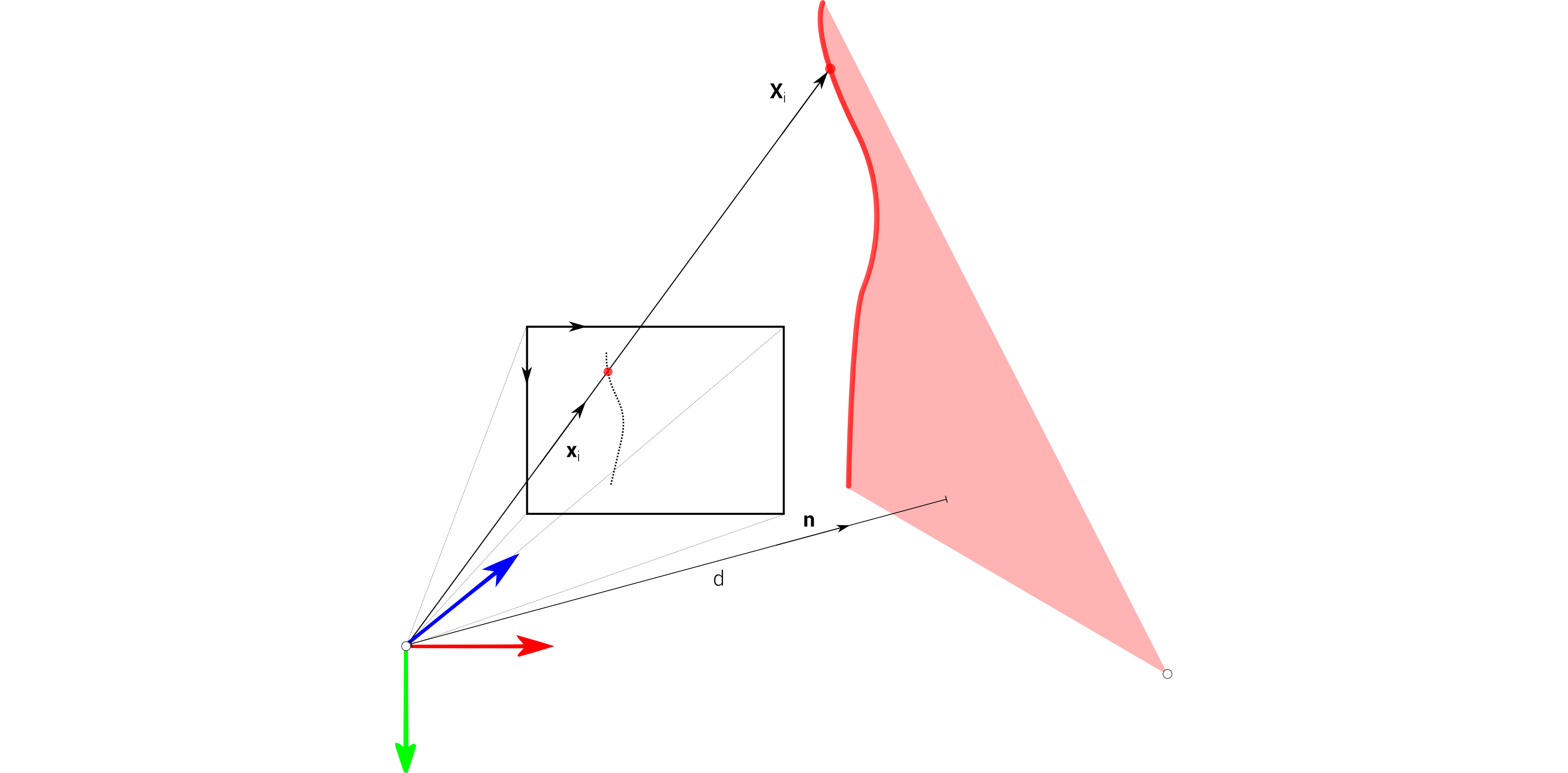
Laser plane intersection¶
Normal vector $\textbf{n}$ and minimum distance $d$ is the minimum information required to define a plane in a three dimensional space. In order to determine the real coordinates of the point in mm, the intersection calculation of the projection point normalized with the corresponding laser plane is needed.
d = 156.11
n = np.matrix([[-0.86952], [-0.020884], [0.493456]])
Xc = (d / float(n.T.dot(x))) * x
print(Xc)
[[ -24.00891089] [ -77.26631436] [ 270.78430923]]
The result is the point in a real 3D space respect to the camera coordinate system, in mm.
Homogeneus transformation¶
The point $\textbf{X}_c$ is transformed to the world inertial system using homogeneus transformation $[R_c, \textbf{t}_c]$
![]()
R = np.matrix([[0,1,0],[0,0,-1],[-1,0,0]])
t = np.matrix([[-3],[22],[315]])
Xwo = R.T * Xc - R.T * t
print(Xwo)
[[ 44.21569077] [-21.00891089] [ 99.26631436]]
This is the same point computed in the previous step, but in the world intertial system instead, that is, a system attached to the platform.
World rotation¶
Finally, the point is transformed to a fixed common system. To do that, the performance of another transformation from the inertial system to the world fixed coordinate system is needed. In Ciclop, this is a rotation in common z axis of $\theta$, the current angle in the scanning process.

theta = -37.35 * np.pi / 180.0
c = np.cos(theta)
s = np.sin(theta)
Rz = np.matrix([[c, -s, 0], [s, c, 0], [0, 0, 1]])
Xw = Rz * Xwo
print(Xw)
[[ 22.40327826] [-43.52579431] [ 99.26631436]]