Pattern detection¶
In this article it is explained the chessboard pattern and how it is detected. The pattern is used in the calibration processes.
Chessboard pattern¶
In [1]:
# Pattern parameters
rows = 6
columns = 11
square_width = 13
In [2]:
import cv2
# Load image
image = cv2.imread('images/4.2. Camera calibration/captures/frame0.jpg')
In [3]:
%matplotlib inline
import matplotlib.pyplot as plt
def plot_image(image):
f, axarr = plt.subplots(1, 1, figsize=(8,8))
axarr.axis('off')
axarr.imshow(image)
axarr.plot()
plot_image(image)

Corners detection¶
Find corners¶
In [4]:
# Convert image to 1 channel
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
# Find the chess board corners
ret, corners = cv2.findChessboardCorners(gray, (columns, rows), flags=cv2.CALIB_CB_FAST_CHECK)
Subpixel accuracy¶
In [5]:
# termination criteria
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# Find corners with subpixel accuracy
cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
Draw corners¶
In [6]:
# Draw corners into image
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
cv2.drawChessboardCorners(image, (columns, rows), corners, ret)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
In [7]:
# Show image
plot_image(image)

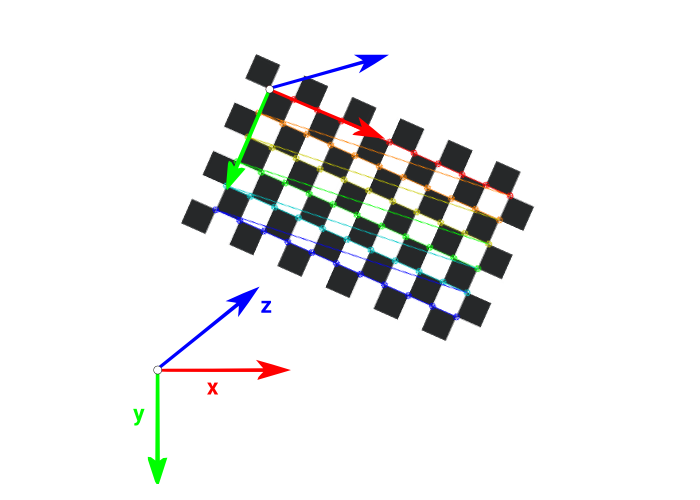
Pose detection¶
Pose refers to the coordinate system of the pattern. It is represented by a Rotation matrix and a Traslation vector. In order to determine this values Camera intrinsics parameters are needed. Those values are obtained in Camera calibration.
In [8]:
import numpy as np
# Compute object points
objp = np.zeros((rows * columns, 3), np.float32)
objp[:, :2] = np.mgrid[0:columns, 0:rows].T.reshape(-1, 2)
objp *= square_width
# Camera calibration results
camera_matrix = np.array([[1430, 0, 480],[0, 1430, 640],[0, 0, 1]])
distortion_coefficients = np.array([0.0, 0.0, 0.0, 0.0, 0.0])
# Compute pose
ret, rvecs, tvecs = cv2.solvePnP(objp, corners, camera_matrix, distortion_coefficients)
if ret:
R = cv2.Rodrigues(rvecs)[0]
t = tvecs.T[0]
n = R.T[2]
d = np.dot(n, t)
print("\nRotation matrix\n\n{0}\n".format(R))
print("\nTranslation vector\n\n{0} mm\n".format(t))
print("\nPlane normal\n\n{0}\n".format(n))
print("\nPlane distance\n\n{0} mm\n".format(d))
Rotation matrix [[-0.04096853 -0.96650225 0.25336728] [ 0.99915986 -0.03990222 0.00934819] [ 0.00107487 0.2535374 0.96732499]] Translation vector [ 34.44493845 -65.9290978 216.55043397] mm Plane normal [ 0.25336728 0.00934819 0.96732499] Plane distance 217.585548505 mm