#!/usr/bin/env python
# coding: utf-8
# Spring Pendulum Example
# MCHE 513: Intermediate Dynamics
# Dr. Joshua Vaughan
# joshua.vaughan@louisiana.edu
# http://www.ucs.louisiana.edu/~jev9637/
# In this example, we'll determine the equations of motion for the spring pendulum system shown in Figure 1. The system consists of a point mass, $m$, connected to an ideal pin by a spring of stiffness $k$. The rotation of the pendulum is represented by $\theta$ and the length of the spring by $R$. The equilibrium length of the spring is $L_0$.
#
#
# 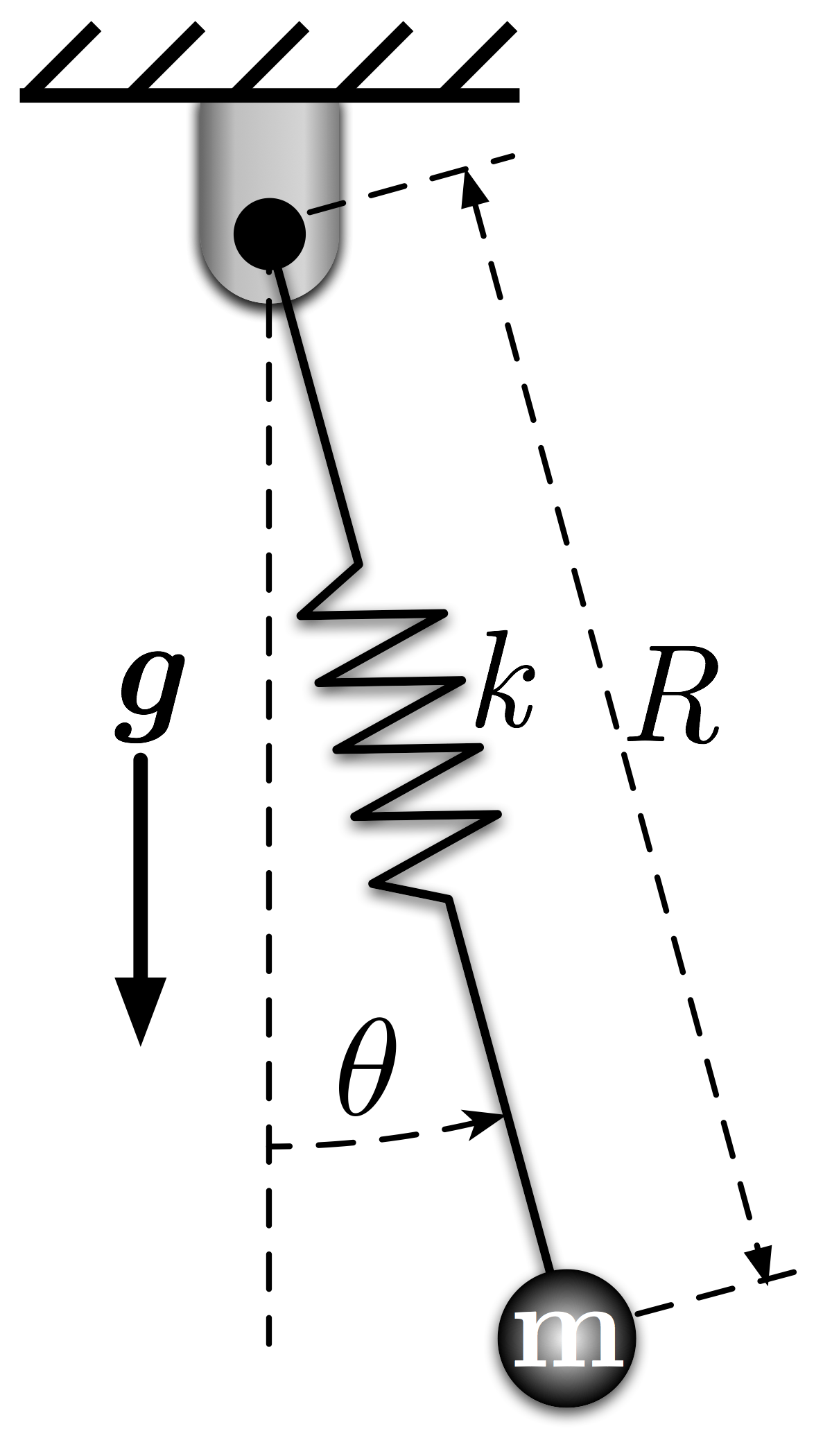
# Figure 1: Spring Pendulum
#
# In[1]:
# Import the SymPy Module
import sympy
# Import the necessary sub-modules and methods for dynamics
from sympy.physics.mechanics import dynamicsymbols
from sympy.physics.mechanics import LagrangesMethod, Lagrangian
from sympy.physics.mechanics import Particle, Point, ReferenceFrame
# initiate better printing of SymPy results
sympy.init_printing()
# In[2]:
# Set up the display for retina screens
#
# Default setting can also be changes in in ipython_kernel_config.py
# c.InlineBackend.figure_formats = set(['retina'])
# See: https://twitter.com/miishke/status/670045268562329600
from IPython.display import set_matplotlib_formats
set_matplotlib_formats('retina')
# In[3]:
# Define the genearlized coordinate
R, theta = dynamicsymbols('R theta')
# Also define the first derivative
R_dot, theta_dot = dynamicsymbols('R theta', 1)
# Define the symbols for the other paramters
m, g, k, l0, t = sympy.symbols('m g k L_0 t')
# In[4]:
# Define the Newtonian reference frame
N = ReferenceFrame('N')
# Define a body-fixed frame along the pendulum, with y aligned from m to the pin
A = N.orientnew('A', 'Axis', [theta, N.z])
# Define the points and set its velocity
P = Point('P')
P.set_vel(N, R * theta_dot * A.x - R_dot * A.y)
mp = Particle('mp', P, m)
mp.potential_energy = -m * g * R * sympy.cos(theta) + 1/2 * k * (R - l0)**2
# Set up the force list - each item follows the form:
# (the location where the force is applied, its magnitude and direction)
# Here, there are no non-conservataive external forces
forces = []
# Form the Lagrangian
L = Lagrangian(N, mp)
# Print the Lagrangian as a check
L
# In[5]:
# This creates a LagrangesMethod class instance that will
# allow us to form the equations of motion, etc
LM = LagrangesMethod(L, [R, theta], forcelist = forces, frame = N)
# In[6]:
# Form the equations fo motion
EqMotion = LM.form_lagranges_equations()
# Print the simplified version of the equations of motion
sympy.simplify(EqMotion)
# The LagrangesMethod class gives us lots of information about the system. For example, we can output the mass/inertia matrix and the forcing terms. Note that the forcing terms include what might be conservative forces and would therefore normally appear in a stiffness matrix.
# In[7]:
# Output the inertia/mass matrix of the system
LM.mass_matrix
# In[8]:
# Output the forcing terms of the system
LM.forcing
# We can also use builtin functions to write the sytsem as a set of first order ODEs, suitable for simluation.
# In[9]:
# Make the call to set up in state-space-ish form q_dot = f(q, t)
lrhs = LM.rhs()
# Simplify the results
lrhs.simplify()
# Output the result
lrhs
# We can also linearize these equations with builtin SymPy methods. Let's do so about the $\theta = 0$, $\dot{\theta} = 0$ operating point. The resulting equations returned are a system of first order ODEs in state-space form:
#
# $$ \dot{x} = Ax + Bu $$
#
# See the [SymPy Documentation](http://docs.sympy.org/0.7.6/modules/physics/mechanics/linearize.html#linearizing-lagrange-s-equations) for much more information.
# In[10]:
# Define the point to linearize around
operating_point = {R: l0, R_dot: 0.0, theta: 0.0, theta_dot: 0.0}
# Make the call to the linearizer
A, B, inp_vec = LM.linearize([R, theta], [R_dot, theta_dot],
op_point = operating_point,
A_and_B = True)
# In[11]:
A
# In[12]:
B
# ## Simulation
# We can pass these equations of motion to numerical solver for simluation. To do so, we need to import [NumPy](http://numpy.org) and the [SciPy](http://www.scipy.org) ode solver, ```ode```. We'll also import [matplotlib](http://www.scipy.org) to enable plotting of the results.
#
# For a system as simple as this one, we could easily set up the necessary components for the numerical simulation manually. However, here we will automate as much as possible. Following a similar procedure on more complicated systems would be necessary.
# In[13]:
# import NumPy with namespace np
import numpy as np
# import the scipy ODE solver
from scipy.integrate import ode
# import the plotting functions from matplotlib
import matplotlib.pyplot as plt
# set up the notebook to display the plots inline
get_ipython().run_line_magic('matplotlib', 'inline')
# In[14]:
# Define the states and state vector
w1, w2, w3, w4 = sympy.symbols('w1 w2 w3 w4', cls=sympy.Function)
w = [w1(t), w2(t), w3(t), w4(t)]
# Set up the state definitions and parameter substitution
sub_params = {R : w1(t),
theta: w2(t),
R_dot : w3(t),
theta_dot: w4(t),
m : 1.0,
g : 9.81,
k : 10.0,
l0 : 2.0}
# Create a function from the equations of motion
# Here, we substitude the states and parameters as appropriate prior to the lamdification
eq_of_motion = sympy.lambdify((t, w),
lrhs.subs(sub_params))
# In[15]:
# Set up the initial conditions for the solver
R_init = 2.5 # Initial spring length
R_dot_init = 0.0 # Initial radial velocity
theta_init = 10.0 * np.pi/180 # Initial angle
theta_dot_init = 0.0 # Initial angular velocity
# Pack the initial conditions into an array
x0 = [R_init, theta_init, R_dot_init, theta_dot_init]
# Create the time samples for the output of the ODE solver
sim_time = np.linspace(0.0, 10.0, 1001) # 0-10s with 1001 points in between
# In[16]:
# Set up the initial point for the ode solver
r = ode(eq_of_motion).set_initial_value(x0, sim_time[0])
# define the sample time
dt = sim_time[1] - sim_time[0]
# pre-populate the response array with zeros
response = np.zeros((len(sim_time), len(x0)))
# Set the initial index to 0
index = 0
# Now, numerically integrate the ODE while:
# 1. the last step was successful
# 2. the current time is less than the desired simluation end time
while r.successful() and r.t < sim_time[-1]:
response[index, :] = r.y
r.integrate(r.t + dt)
index += 1
# Now, let's plot the results. The first column of the ```response``` vector is the radial position of the endpoint, $R$, and the second is angle of the pendulum, $\theta$. We first plot $R$, then $\theta$ below, after setting up plotting parameters to make the plot more readable.
# In[17]:
# Set the plot size - 3x2 aspect ratio is best
fig = plt.figure(figsize=(6, 4))
ax = plt.gca()
plt.subplots_adjust(bottom=0.17, left=0.17, top=0.96, right=0.96)
# Change the axis units to serif
plt.setp(ax.get_ymajorticklabels(), family='serif', fontsize=18)
plt.setp(ax.get_xmajorticklabels(), family='serif', fontsize=18)
# Remove top and right axes border
ax.spines['right'].set_color('none')
ax.spines['top'].set_color('none')
# Only show axes ticks on the bottom and left axes
ax.xaxis.set_ticks_position('bottom')
ax.yaxis.set_ticks_position('left')
# Turn on the plot grid and set appropriate linestyle and color
ax.grid(True,linestyle=':', color='0.75')
ax.set_axisbelow(True)
# Define the X and Y axis labels
plt.xlabel('Time (s)', family='serif', fontsize=22, weight='bold', labelpad=5)
plt.ylabel('Displacement (m)', family='serif', fontsize=22, weight='bold', labelpad=10)
# Plot the data
plt.plot(sim_time, response[:, 0], linewidth=2, linestyle='-', label = 'R')
# uncomment below and set limits if needed
# plt.xlim(0, 5)
# plt.ylim(-1, 1)
# Create the legend, then fix the fontsize
# leg = plt.legend(loc='upper right', ncol = 1, fancybox=True)
# ltext = leg.get_texts()
# plt.setp(ltext, family='serif', fontsize=20)
# Adjust the page layout filling the page using the new tight_layout command
plt.tight_layout(pad=0.5)
# Uncomment to save the figure as a high-res pdf in the current folder
# It's saved at the original 6x4 size
# plt.savefig('Spring_Pendulum_Response_Radial.pdf')
fig.set_size_inches(9, 6) # Resize the figure for better display in the notebook
# In[18]:
# Set the plot size - 3x2 aspect ratio is best
fig = plt.figure(figsize=(6, 4))
ax = plt.gca()
plt.subplots_adjust(bottom=0.17, left=0.17, top=0.96, right=0.96)
# Change the axis units to serif
plt.setp(ax.get_ymajorticklabels(), family='serif', fontsize=18)
plt.setp(ax.get_xmajorticklabels(), family='serif', fontsize=18)
# Remove top and right axes border
ax.spines['right'].set_color('none')
ax.spines['top'].set_color('none')
# Only show axes ticks on the bottom and left axes
ax.xaxis.set_ticks_position('bottom')
ax.yaxis.set_ticks_position('left')
# Turn on the plot grid and set appropriate linestyle and color
ax.grid(True,linestyle=':', color='0.75')
ax.set_axisbelow(True)
# Define the X and Y axis labels
plt.xlabel('Time (s)', family='serif', fontsize=22, weight='bold', labelpad=5)
plt.ylabel('Angle (deg)', family='serif', fontsize=22, weight='bold', labelpad=10)
# Plot the data
plt.plot(sim_time, response[:, 1] * 180/np.pi, linewidth=2, linestyle='-', label = '$\theta$')
# uncomment below and set limits if needed
# plt.xlim(0, 5)
# plt.ylim(-1, 1)
# Create the legend, then fix the fontsize
# leg = plt.legend(loc='upper right', ncol = 1, fancybox=True)
# ltext = leg.get_texts()
# plt.setp(ltext, family='serif', fontsize=20)
# Adjust the page layout filling the page using the new tight_layout command
plt.tight_layout(pad=0.5)
# Uncomment to save the figure as a high-res pdf in the current folder
# It's saved at the original 6x4 size
# plt.savefig('Spring_Pendulum_Response_Angle.pdf')
fig.set_size_inches(9, 6) # Resize the figure for better display in the notebook
# We can maybe get a better understanding of the response by plotting a planar view of the endpoint motion over time. To do so, we need to define the $x$ and $y$ position of the endpoint.
# In[19]:
# Defines the position of the endpoint in x-y
# The origin is set as the pin location
x = response[:,0] * np.sin(response[:,1])
y = -response[:,0] * np.cos(response[:,1])
# Now, let's plot the position over time.
# In[20]:
# Set the plot size - 3x2 aspect ratio is best
fig = plt.figure(figsize=(6, 4))
ax = plt.gca()
plt.subplots_adjust(bottom=0.17, left=0.17, top=0.96, right=0.96)
# Change the axis units to serif
plt.setp(ax.get_ymajorticklabels(), family='serif', fontsize=18)
plt.setp(ax.get_xmajorticklabels(), family='serif', fontsize=18)
# Remove top and right axes border
ax.spines['right'].set_color('none')
ax.spines['top'].set_color('none')
# Only show axes ticks on the bottom and left axes
ax.xaxis.set_ticks_position('bottom')
ax.yaxis.set_ticks_position('left')
# Turn on the plot grid and set appropriate linestyle and color
ax.grid(True,linestyle=':', color='0.75')
ax.set_axisbelow(True)
# Define the X and Y axis labels
plt.xlabel('Horizontal Position (m)', family='serif', fontsize=22, weight='bold', labelpad=5)
plt.ylabel('Vertical Position (m)', family='serif', fontsize=22, weight='bold', labelpad=10)
# Plot the data
plt.plot(x, y, linewidth=2, linestyle='-')
# uncomment below and set limits if needed
plt.xlim(-1, 1)
plt.ylim(1.25*np.min(y), 0.01)
# Adjust the page layout filling the page using the new tight_layout command
plt.tight_layout(pad=0.5)
# Uncomment to save the figure as a high-res pdf in the current folder
# It's saved at the original 6x4 size
# plt.savefig('Spring_Pendulum_Response_Planar.pdf')
fig.set_size_inches(9, 6) # Resize the figure for better display in the notebook
#
# #### Licenses
# Code is licensed under a 3-clause BSD style license. See the licenses/LICENSE.md file.
#
# Other content is provided under a [Creative Commons Attribution-NonCommercial 4.0 International License](http://creativecommons.org/licenses/by-nc/4.0/), CC-BY-NC 4.0.
# In[21]:
# This cell will just improve the styling of the notebook
# You can ignore it, if you are okay with the default sytling
from IPython.core.display import HTML
import urllib.request
response = urllib.request.urlopen("https://cl.ly/1B1y452Z1d35")
HTML(response.read().decode("utf-8"))